GPIO and Home Assistant
As part of moving my home server to solar power, I need a way of switching over to mains if there’s been a few grey days and the battery is getting low.
HEYO BMS Notes
The HEYO BMS appears to be a DALY clone. My 8S 60A model has a selection of ports - on the top: NTC (3 pin) UART (6 pin) Unnamed 5 pin) On the bottom:

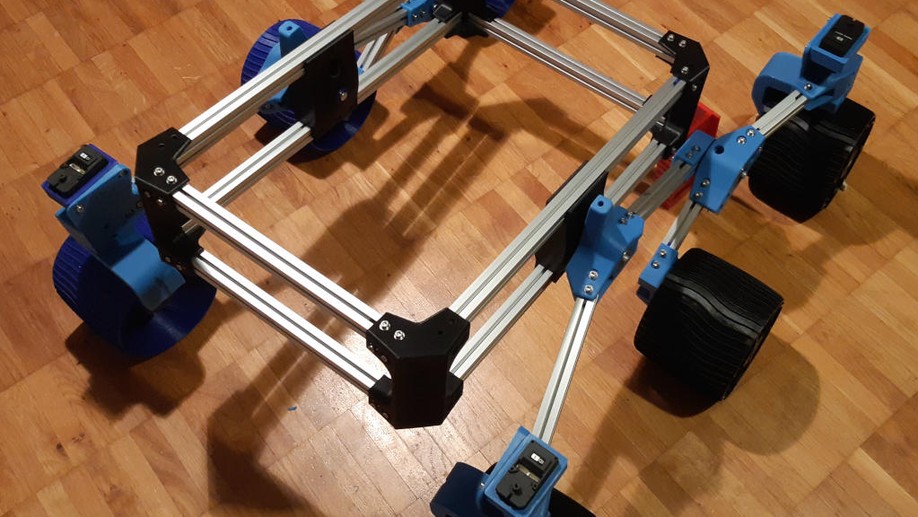
Ausdauer: mechanical assembly
And that’s the end of the mechanical assembly. The differential went on fine, and the epoxy is strong enough to hold in the insets. There’s one last thing - I missed the insets on the end of the differential arm, so those are glued and curing
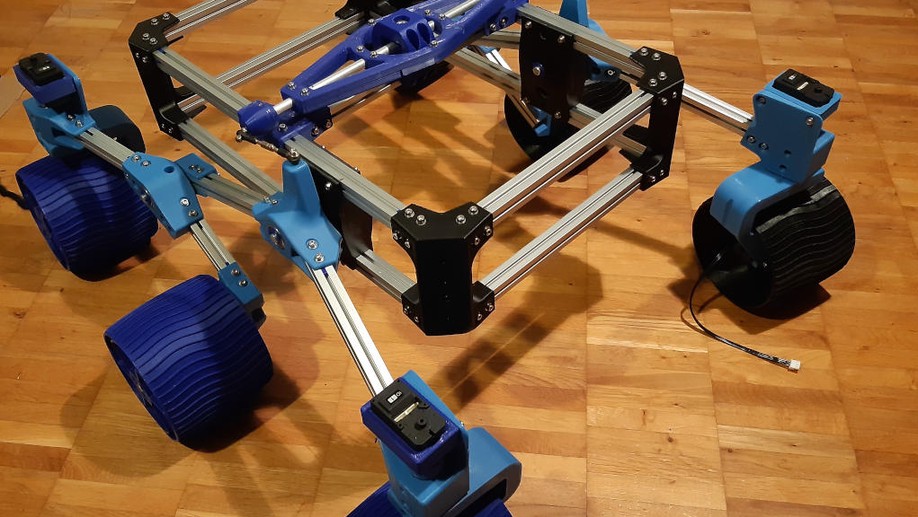
Ausdauer: assembled
I’ve almost completed the right hand side, and the left hand side is far enough along that I can assemble the whole rover!

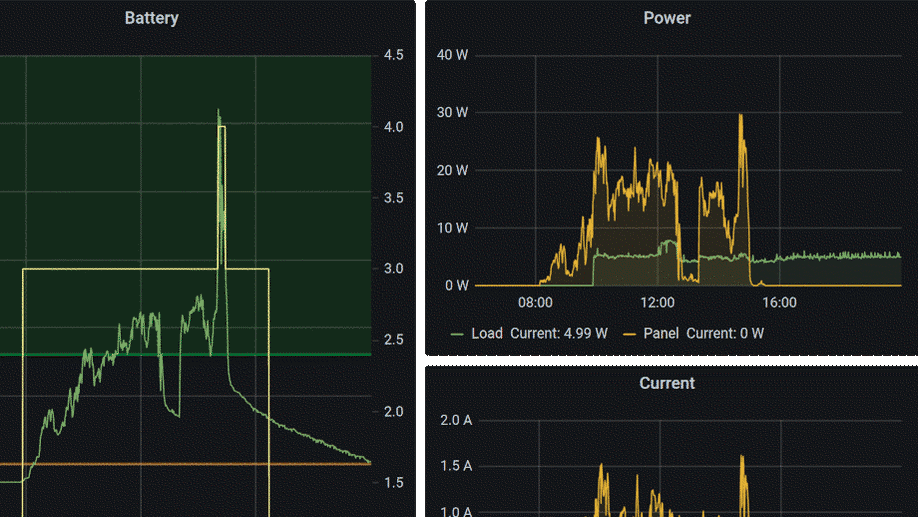
VE.Direct
I’ve released vedirect, a tool parses the Victron VE.Direct TEXT protocol and exports the metrics over Prometheus and MQTT. This can be used to monitor your solar installation and view statistics in tools like Grafana or Home Assistant.

nppilot
I realized I haven’t posted about the current generation of nppilot, my never complete, often restarted rover project. The current version is a modified Traxxas E-Revo 1/16: Under the hood this is:
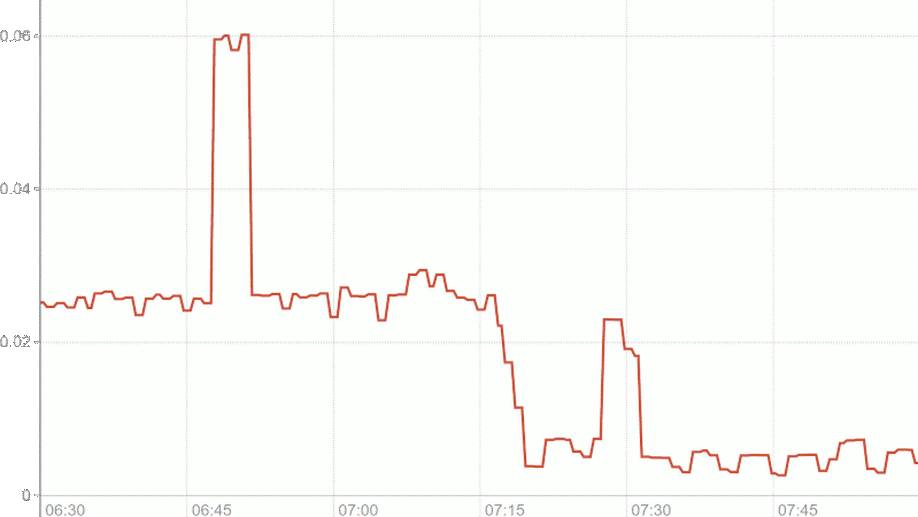
Reducing disk IO
I’m using a Raspberry Pi 4 with a USB3 based SSD to host this website and other services, and as a side effect the lounge looks like a disco due to all the flashing activity LEDs.
Solar at home
For the last month or so I’ve been working on making my home server (which also hosts this blog!) solar powered. It’s pointless but entertaining, and this is a first of a series of posts about what I learned on the way.