Adding all the CH32V003s to Zephyr
kholia@ and I have been working on adding support for the low-cost CH32V003 to Zephyr, which got me wondering: how many readily available CH32V003 boards are there, and what would it be like support all of them to Zephyr?
Performance of a Minn Kota electric motor on an inflatable hull
As a summer project, I’m experimenting with adding an electric trolling motor on a 2.9 m inflatable. My medium term goal is to hook up a leftover Ardupilot and have the boat slowly take me around the lake in the most plesent way possible.
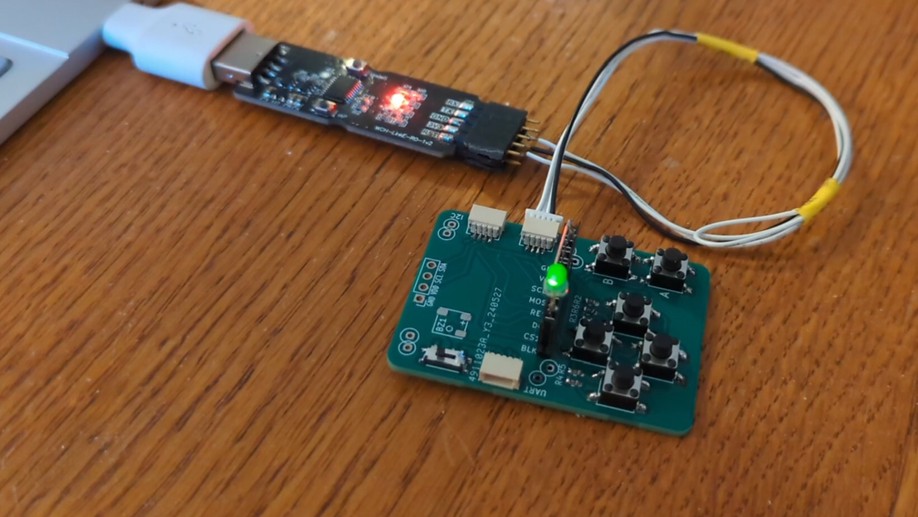
Faster SPI bitbang for Zephyr on the ch32v003
As part of porting Zephyr to the CH32V003, I’ve been working on my own spin of wagiminator@’s CH32V003 based mini game console. Once change was swapping the monochrome OLED dispaly for a 160x80 colour LCD with a ST7735R controller.
My own spin of the CH32V003 Mini Game Console
kholia@ and I are working on porting Zephyr to the CH32V003. While he’s sorting out license issues, I’ve been working on my own spin of wagiminator@’s CH32V003 based mini game console.
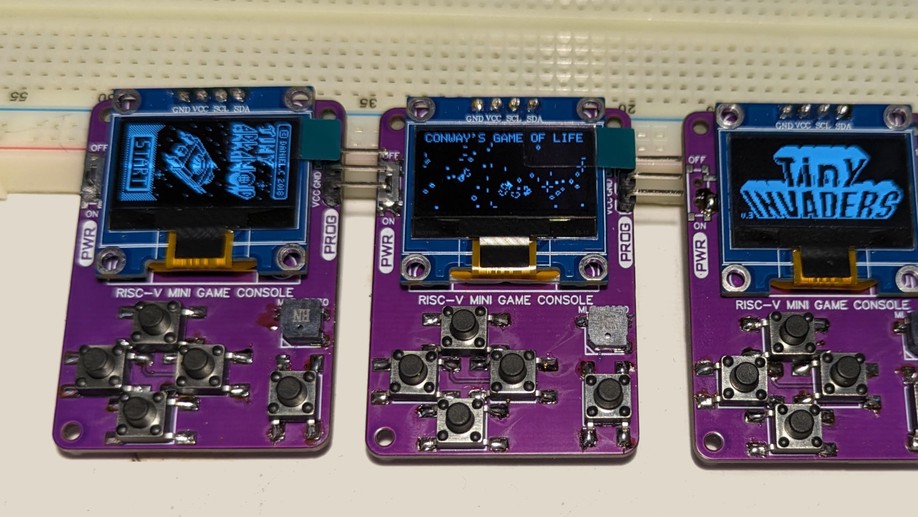
CH32V003 Mini Game Console build
I had fun building a few of wagiminator@’s CH32V003 based mini game console. This was my first time buying from LCSC, ad I was quite happy with the selection and turn around time.
Ampler eBike Bluetooth protocol
I have an Ampler Stout eBike which exposes metrics as Bluetooth attributes over GATT. I’d like to track the battery level and odomoter, so spent some time and decoded some of the attributes.
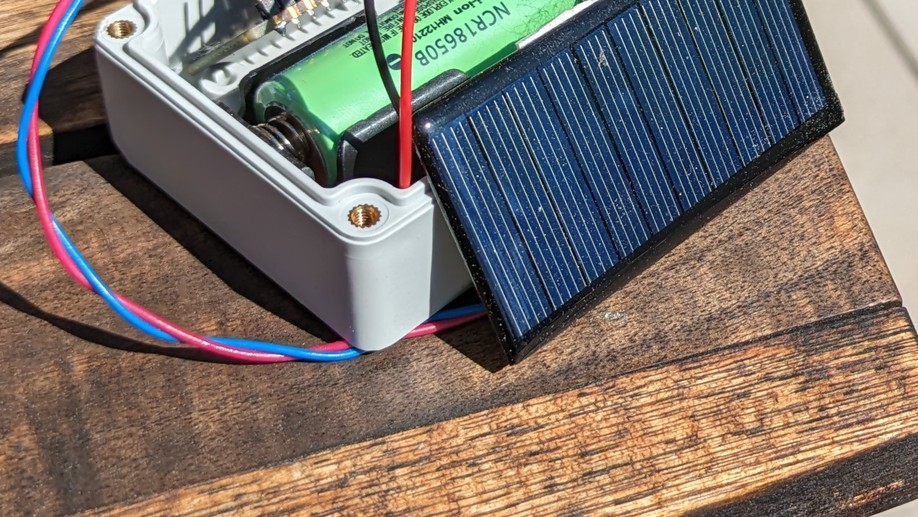
Solar powered ESPHome sensor
I’m experimenting with a long life, solar powered ESPHome based device. The original idea was for outside, low update rate sensors such as a tank water level sensor. Looks like the power consumption is too high, but it’s been interesting.
ESP32 as a low power sensor
Notes on using an ESP32 as a low power sensor: Battery: I have some 18650’s already Battery holder is 76 x 21 x 19 LiPo drop by about 1 % per month 3000 mAh at 1 %/month is ~40 uA/h ESP32:
Updates to wordclock
A few years ago I made a MicroPython based word clock ( example). I’ve refreshed it to work with the latest version of MicroPython and added a MQTT based interface to Home Assistant.
OpenWrt as the first point in my network
I’d like to separate the primary and secondary services in my home network so, for example, a problem with Nginx doesn’t break the home automation. The current plan is to put the primary services including routing and basic automation onto one simple machine and see if that helps.