I realized I haven’t posted about the current generation of nppilot,
my never complete, often restarted rover project.
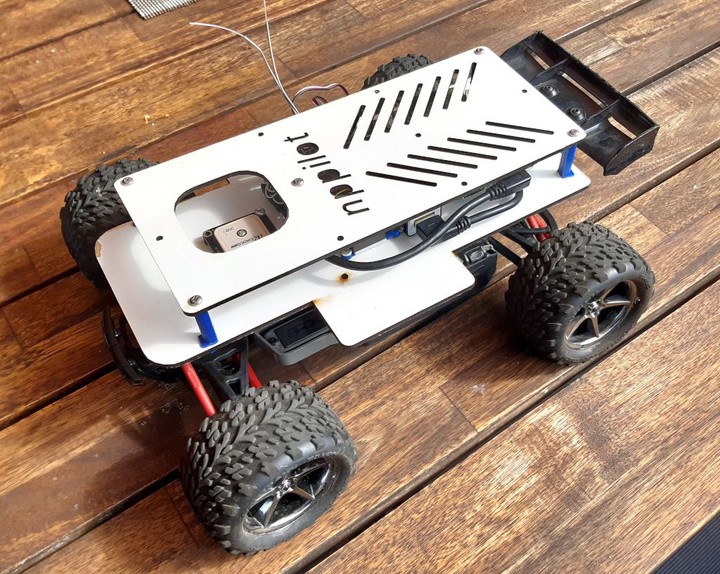
The current version is a modified Traxxas E-Revo 1/16:
Under the hood this is:
- A Revo controller running ROSflight for control and sensors.
- A Raspberry Pi 3 running ROS for command and telemetry.
The frame is laser cut MDF with 3D printed mounts and risers.
It works well, but winter came before I made much progress on the control. The goal is for the Pi to do the planning using the GPS and a map of the local area, and to see how fast it can complete the course.