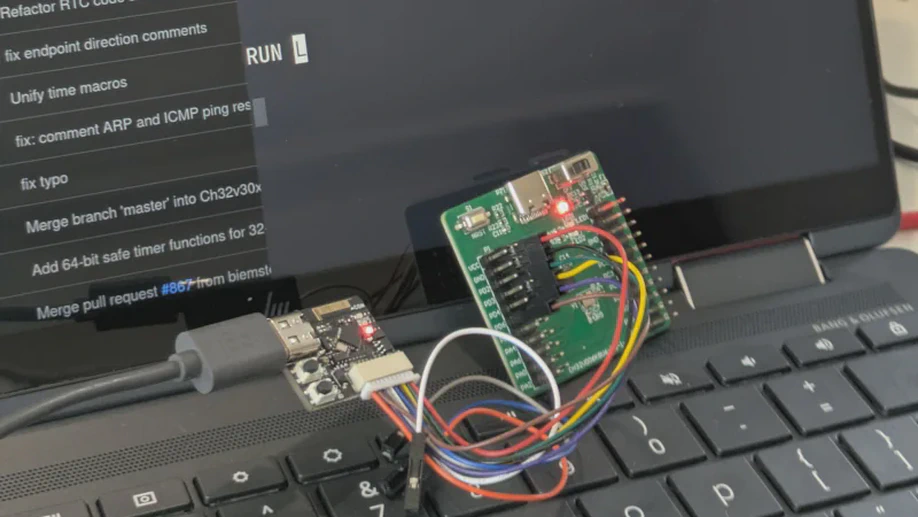
Bit Pirate CH32V003 programmer support
I’ve added support for programming CH32V003 and other CH32V devices to the Bit Pirate firmware. This implements a USB adapter for the CH32V003 single wire debug (SWIO) protocol and exposes it via the arduino-ch32v003-swio serial protocol which can then be programmed via minichlink.
6502 and Apple 1 emulation
I couldn’t resist and re-used the architecture of my recent Z80 projects to make a 6502 and Apple 1 emulator. According to the Rugg/Feldman benchmarks, the emulator runs like a 1.
Finishing up my ZX81 on the CH32V006
I’ve finished my Z80 emulator for the CH32V006. It was interesting experimenting with different interpreter architectures as the CH32V006 is RISC-V and the performance was very sensitive to the compiler and architecture.
Dead ends on emulator performance
My Z80 emulator now runs on the CH32V006 and achieves better than real time, so I’ve been looking at ways of improving the performance. So far most have been dead ends.
Z80 emulation
I’m experimenting with writing yet another Z80 CPU emulator. So far it can take the instruction set definition from deeptoaster/opcode-table, convert it to a computed goto form, and boot the ZX81 ROM.
A simple ZX81 emulator on the CH32V006
It’s a toy, but I can now emulate a 1980’s ZX81 on the CH32V006. The performance is equivalent to about a 3 MHz Z80 which, due to how the ZX81 spends most of the time drawing the display rather than running the code, means the overall system is faster than the original.
Heewing F01 balance
I’m building a Heewing F01 using a Holybro Kakute F405-Wing Mini and some spare parts. It’s an interesting build as the baseline has moved on since I first brought my RC equipment and, for example, the autopilot does not support PPM but only serial based protocols such as SBUS.

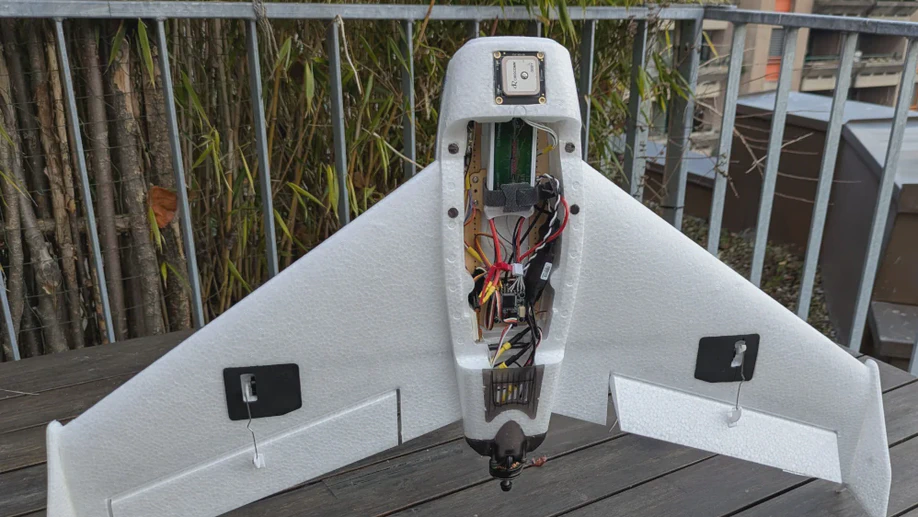
Pixhawk GPS pinout
Writing this down for future me. I’m assembling a drone using some old parts and could not find the pinout to this GPS / compass combo: For reference, with the antenna pointing up and looking at the connector, then the pins from left to right are:

Stiebel Eltron LWZ 130 and Home Assistant: blinking
So far so good. Home Assistant can send commands to the ESP32, which sends Modbus coil writes to the CH32V006, which turns the LEDs on and off. Next is the I2C side.
Stiebel Eltron LWZ 130 and Home Assistant
I have a LWZ 130 ventilator that I’d like to hook up to Home Assistant to control the fan speed and to get other metrics like the inlet and inside temperature.